Windsyn is a program developed by Gabor Furst, Vancouver-Canada. The program takes the manufacturers data as input and fits an electrical machine model including proper startup parameters and control. The following types of machines are supported:
•Induction machine; wound rotor
•Induction machine; single cage rotor
•Induction machine; double cage rotor
•Induction machine; deep bar rotor
•Synchronous machine; salient rotor d-axis damping
•Synchronous machine; salient rotor d- and q-axis damping
•Synchronous machine; round rotor d- and q-axis damping
•Synchronous machine; full second order model used in SM type 59. New in v7.6.
The machine model implements a mechanical system with a single mass, but the mechanical torque node is available for manual connection of more masses. All machines are assumed to be linear.
ATPDraw embedded
In ATPDraw 5.7 the approach in Windsyn is directly embedded in ATPDraw without any external requirements.
Induction machine and synchronous machines appear as two separated components; UMIND and UMSYN respectively.
Both components are found in the Selection menu under Machines|Induction WU/Synchronous WU.
Both machines require manufacturers data, and offer flexible start-up options.
This component can be mixed with other Universal Machine components. The UM number is managed by ATPDraw and presented to the user in an disabled edit box. This number is used in the plotting program to identify the machine. There are no external files associated with the embedded windsyn variant and these components works as any other component (edit, grouping). $Parameters are disabled since the values are used in internal calculations. Consult the Universal Machine section of the RuleBook for restrictions for common bus and load.
•Automatic start-up: ATP|Settings/Switch&UM. Specify Initial slip [%] (positive for motor)
•Manual start-up (ramp): ATP|Settings/Switch&UM. Specify Initial load [pu] (positive for motor)
There is no need to recalculate parameters when changing start-up mode.
•Compensation/Prediction: No changes required inside the model if solution method changes.
Both the induction and the synchronous machines have an embedded Governor for active power or speed control. The user can choose either simplified hydro or generic governors.
Induction machine
In the induction machine there is a fitting process based on power factor, efficiency, starting current and torque, rated current and slip and maximum torque. The fitting is automatically performed when the user clicks on the 'Fit & View' button. This brings up the induction machine fitting dialog.
To the left comes the 7 fitting parameters where the Entered values can be modified and the Fitted values are the best values possible. The user can tune the Weight values to modify the fit. Note that the external windsyn program relaxed the slip in the fitting of induction machines.
In order to get the expected power output, the rated current fitting is most important. Reducing the weight of the slip helps in fitting the other parameters (this is what always is done in the external Windsyn).
The default weight of the maximum torque (Tmax) is zero as this typically is the most uncertain parameter. To the right is the resulting electrical parameters used in the Universal Machine model.
The fitting is based on analyzing the following circuits at start-up (Ist, Tst, s=1) and rated power (Is=1, pf, eff, s):
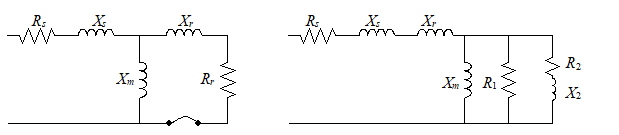
Fig 1.Wound and single cage rotors (left). Double cage and deep-bar rotors (right)
The following object function is minimized based on a gradient method:
OF(Xs,Xm,Rst,s)= w[1]*sqr(1-pfc/pf) + w[2]*sqr(1-effc/eff) + w[3]*sqr(1-Istc/Ist) + w[4]*sqr(1-Tstc/Tst) + w[5]*sqr(1-Is/1)+w[6]*sqr(1-s/slip) + w[7]*sqr(1-Tmaxc/Tmax);
where the index 'c' stands for calculated quantities and w[i] are the weights.
The stator resistance is not a free variable here as it is linked closely to the efficiency and the power factor. The equivalent rotor resistance at startup Rst is used in the fitting. The slip, s, is a free variable, possibly forced to the rated value, slip.
Start-up
For induction machines specify
Item |
Description |
Automatic mode |
Initial slip in [%]. ATP will then determine the torque source according to the initial load flow. With B-breaker > 0 this will result in a no-load start. |
Manual mode |
Initial torque in [pu] (positive for motor). Brkwy torque [pu]is the friction torque at zero speed relevant for motor start-up only (positive torques). The load is modeled as TBrkwy*exp(-|w|/0.03)+TLoad*w^2, where w is the speed of the motor. |
Extra load |
Specify if an extra load in [pu] (positive for motor) is applied, when this happens and the ramp-up time in seconds. The 'Start at rated speed' checkbox will in effect charge the inertia capacitance to its rated voltage. This give a faster reach of rated speed. |
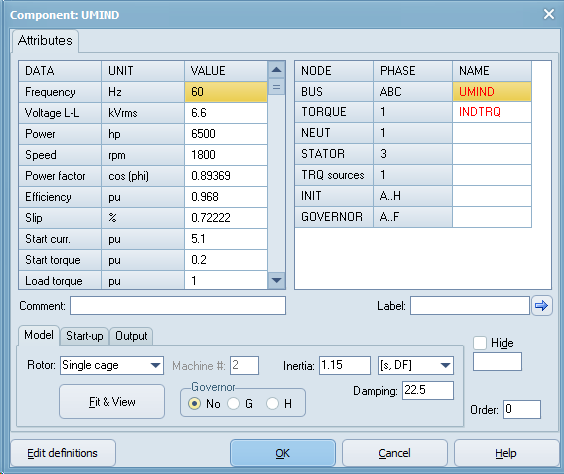
Fig. 2 UMIND input dialog. Copy coil data on the Output tab.
Synchronous machine
The calculation of electrical parameters is automatically performed when the machine data is written to the final ATP file. The Canay reactance is assumed equal to the leakage inductance and the zero sequence reactance is ignored. Calculation shown for round rotor with DQ dampers:
Zbase:=sqr(Voltage)/Power*1000
omega:=Frequency*2*Pi
Rs:= (1-Efficiency)*Zbase
Ls:= Xl*Zbase/omega
Lmd:= (Xd-Xl)*Zbase/omega
Lmq:= (Xq-Xl)*Zbase/omega
Lmd'=(Xd'-Xl)*Zbase/omega
Lmq'=(Xq'-Xl)*Zbase/omega
Lfd:= (Xd-Xl)*(Xd'-Xl)/(Xd-Xd')*Zbase/omega
Lkd:= (Xd'-Xl)*(Xd''-Xl)/(Xd'-Xd'')*Zbase/omega
Lfq:= Xq-Xl)*(Xq'-Xl)/(Xq-Xq')*Zbase/omega
Lkq:= (Xq'-Xl)*(Xq''-Xl)/(Xq'-Xq'')*Zbase/omega;//
If 'Rfd' is not given directly:
Rfd:= (Lfd+Lmd)/Td0'
Rkd:= (Lkd+Lmd')/Td0''
Rfq:= (Lkq+Lmq)/Tq0'
Rkq:= (Lfq+Lmq')/Tq0''
If 'If' is not given directly:
If:= Power/Voltage/(Xd-Xl)
Start-up
For synchronous machines specify
Item |
Description |
Automatic mode: |
Voltage in [%] and Angle [deg]. ATP will then determine torque and field sources according to the initial load flow. With B-breaker > 0 this will result in a no-load start. |
Manual mode: |
Torque in [pu] (positive for motor) and Field voltage in [pu]. The Calc button will estimate the field voltage based on the power factor and (estimated) values of If and Rf. To get the exact expected value of reactive power, the value has to be tuned somewhat and/or an exciter added. |
Start at rated speed |
The checkbox will in effect charge the inertia capacitance to its rated voltage. This give a faster reach of rated speed. |
Extra load |
Specify an extra load in [pu] (positive for motor) is applied, when this happens and the ramp-up time in seconds. |
Exciter |
Two different types are included (DC1 and ST1) with diagrams available under /Exciter/View. The user can choose either voltage or reactive power in [pu] as set-points. |
The input dialog for UMSYN is shown in Fig. 3. The Output page contains the option to copy calculated coil data to the Windows clipboard fpor pasting into universal machines (UM_1 typically). The rotor type Full DQ damp (SM) is new in v7.6 and supports the second order synchronous machine fitting used for type 59 machines (with XCAN=Xl). Zero sequence data is included and time constants can be specified either as from open or short circuit tests in this case. If this second order fitting fails, the model falls back to the Round DQ damp model described above. New in v7.6 is also the possibility to specify mechanical Damping in [pu].
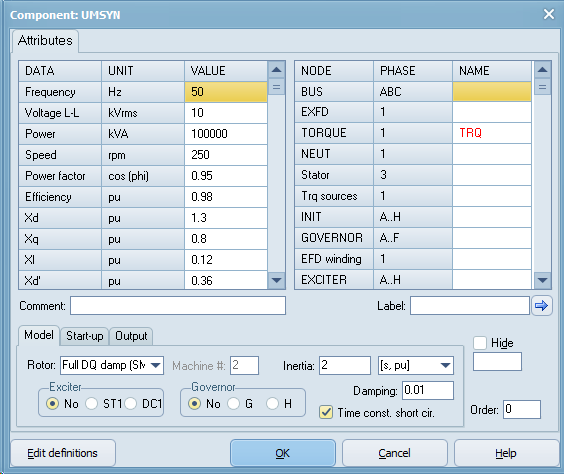
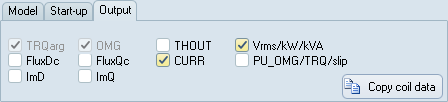
Fig. 3 UMSYN input dialog. Copy coil data on the output tab.